
 Екваторіальна платформа це пристрій у вигляді спеціально розробленої платформи, яка дозволяє будь-якому інструменту, встановленому на ній, відстежувати астрономічні об’єкти. Популярна у власників Добсонів. Після появи 12″ Добсона, (вірніше півдоба, так як конструкція була на диво невдалою-відсутнє тонке руху по азимуту) давно хотів спорудити такий пристрій, але то карантин, то достатню кількість зоряних ночей для виїздів ніяк не давали зайнятися цим. Можливо простіше було б купити екваторіальну платформу (благо у нас в країні їх випускають серійно), але біда в тому, що готові вироби зазвичай не розраховані на такий великий інструмент, як 300 мм Добсон – занадто високо розташований центр ваги.
Екваторіальна платформа це пристрій у вигляді спеціально розробленої платформи, яка дозволяє будь-якому інструменту, встановленому на ній, відстежувати астрономічні об’єкти. Популярна у власників Добсонів. Після появи 12″ Добсона, (вірніше півдоба, так як конструкція була на диво невдалою-відсутнє тонке руху по азимуту) давно хотів спорудити такий пристрій, але то карантин, то достатню кількість зоряних ночей для виїздів ніяк не давали зайнятися цим. Можливо простіше було б купити екваторіальну платформу (благо у нас в країні їх випускають серійно), але біда в тому, що готові вироби зазвичай не розраховані на такий великий інструмент, як 300 мм Добсон – занадто високо розташований центр ваги.
Вирішив нічого не винаходити, а повторити вже готове втілення звідси:http://www.reinervogel.net/Plattform/plattform_VNS_e.html
фактично тут http://www.reinervogel.net/Plattform/Vorlage%20Plattform%2022.pdf готовий мануал із кресленнями сегментів. Погано, що зображення не в масштабі тому довелося самому все розмічати. Вибір упав на модифікацію платформи з вертикальними сегментами (The Large VNS platform).
Матеріали вирішив використати інші, а верхню плиту заодно використовувати і як нерухому основу для самого 12” Доба.
Багато років тому, мені вдалося дістати лист 20мм склотекстоліту (він багато “подорожував” і навіть став у нагоді для зовсім іншого монтування http://www.heavenly-owl.com.ua/wp-content/uploads/%D0%9D%D1%8C%D1%8E%D1%82%D0%BE%D0%BD-300%D0%BC%D0%BC-1.jpg) ,тому коли мені нарешті потрапив до рук цього разу вирішив- робитиму. Правда ця зима не найкращий час для роботи, але варіантів було не багато: чекати до весни або.
Ретельно розмітивши, озброївшись електролобзиком з “крутою” пилочкою та респіратором -взявся за справу. Через пару годин підвішкова основа була вирізана. Нерухлива основа – вирішила зробити з металу, вибрала трубу 40х40 і шматочок 100мм швелера.
Через пару годин підвішкова основа була вирізана. Нерухлива основа – вирішила зробити з металу, вибрала трубу 40х40 і шматочок 100мм швелера.
Для південного підшипника знайшлася лапа-основа від старої шафи совдепівської АТСки. Правда довелося відпиляти зайве) 
Сегменти на свою широту (46грд), мені вирізали на плазморізі з 3мм нержавіючої сталі. (на жаль, якістю я не задоволений, на майбутнє рекомендую лазерне різання). Ролики були зроблені із старих частин якогось совдепівського військового магнітофона. Усі на кулькових підшипниках. Карантинні обмеження завадили все це шукати староконному, тому я вдячний В. Цехместренко за ці надані деталі. Привід із редуктром було куплено на Аліекспрес. Пізніше я знайшов у продажу готові підшипники в потрібних обоймах, і навіть вал з нержавіючої сталі під потрібний діаметр.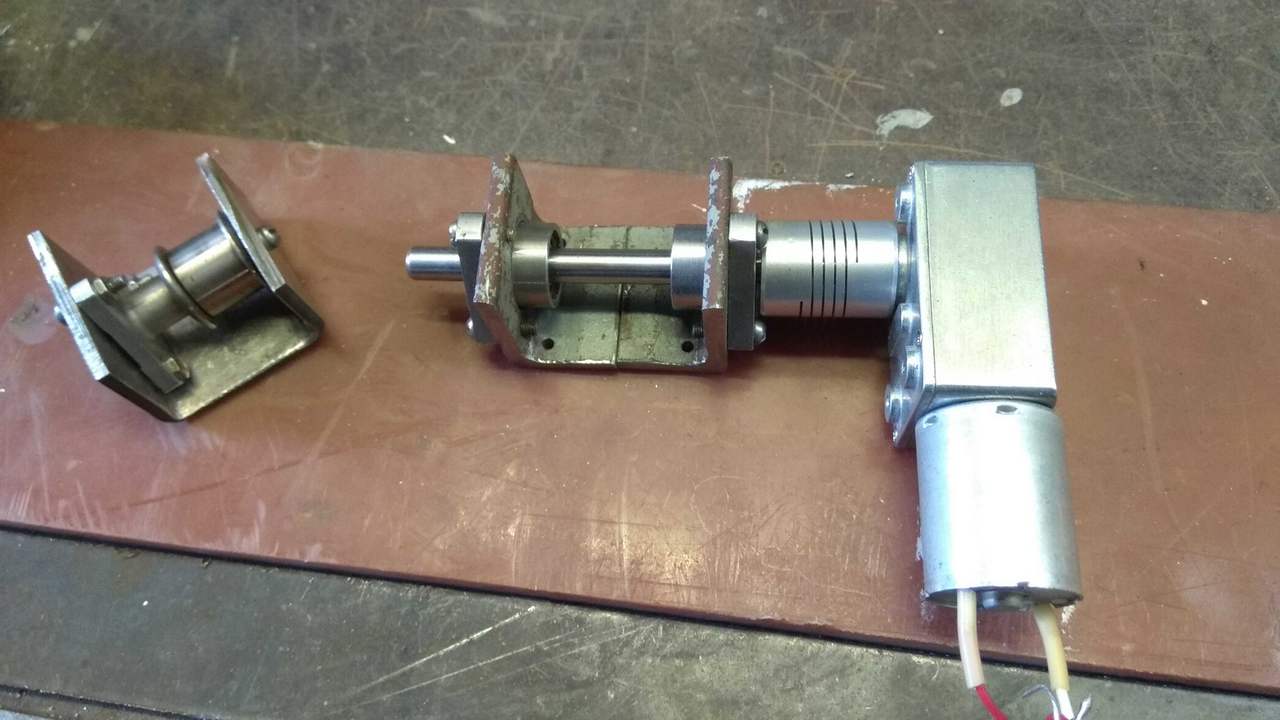 Можливо в майбутньому перероблю, як і сам привід. Саму платформу я робив 2,5 місяці на роботі, у вільний від роботи час )))) В якості інструментів був використаний свердлильний верстат, набір різних свердел, мітчики. Напильники, “турбінка”, ручна ножівка. Гвинти М3, М4, М5 знайшов зі старих запасів. А ось ковпачкові гайки та шайби під регульовані ноги були куплені. Всі підготовчі роботи (розмітка, відрізка під потрібний розмір, свердління, нарізка різьблення, зачистка, підгонка та ін.) були зроблено мною. Тільки зварювальні роботи та фарбування пульверизатором я довірив професіоналам.
Можливо в майбутньому перероблю, як і сам привід. Саму платформу я робив 2,5 місяці на роботі, у вільний від роботи час )))) В якості інструментів був використаний свердлильний верстат, набір різних свердел, мітчики. Напильники, “турбінка”, ручна ножівка. Гвинти М3, М4, М5 знайшов зі старих запасів. А ось ковпачкові гайки та шайби під регульовані ноги були куплені. Всі підготовчі роботи (розмітка, відрізка під потрібний розмір, свердління, нарізка різьблення, зачистка, підгонка та ін.) були зроблено мною. Тільки зварювальні роботи та фарбування пульверизатором я довірив професіоналам.
 Процес виготовлення затягнувся з низки причин. Одна з них потрібно було точно знати, що і як буде, але на практиці часом доводилося на ходу змінювати елементи конструкції. Привід є покупним виріб, в якому поєднаний двигун постійного струму (12В) і редуктор. Швидкість на вихідному валі 1,15 об/хв. Регулювання швидкості здійснюється за допомогою покупного ШІМ контролера. Для більш точного налаштування швидкості довелося замінити штатний змінний потенціометр (110 кОм) на змінний10 кОм + резистор 100 кОм і подовжити дроти до плати.
Процес виготовлення затягнувся з низки причин. Одна з них потрібно було точно знати, що і як буде, але на практиці часом доводилося на ходу змінювати елементи конструкції. Привід є покупним виріб, в якому поєднаний двигун постійного струму (12В) і редуктор. Швидкість на вихідному валі 1,15 об/хв. Регулювання швидкості здійснюється за допомогою покупного ШІМ контролера. Для більш точного налаштування швидкості довелося замінити штатний змінний потенціометр (110 кОм) на змінний10 кОм + резистор 100 кОм і подовжити дроти до плати. Багато часу зайняло обмірковування та реалізація системи плавного руху самої «тумби» труби телескопа, по новій рухомій платформі зі склотекстоліту. Вирішено було відмовитися від підшипників на користь трьох майданчиків та фторопласту. Купивши на ринку пруток діаметром 20мм, за допомогою токаря розрізав три частини завдовжки по 10мм. Акуратно зробивши потай для гвинтів М4, закріпив на різьблення в рівновіддалених точках.
Багато часу зайняло обмірковування та реалізація системи плавного руху самої «тумби» труби телескопа, по новій рухомій платформі зі склотекстоліту. Вирішено було відмовитися від підшипників на користь трьох майданчиків та фторопласту. Купивши на ринку пруток діаметром 20мм, за допомогою токаря розрізав три частини завдовжки по 10мм. Акуратно зробивши потай для гвинтів М4, закріпив на різьблення в рівновіддалених точках. 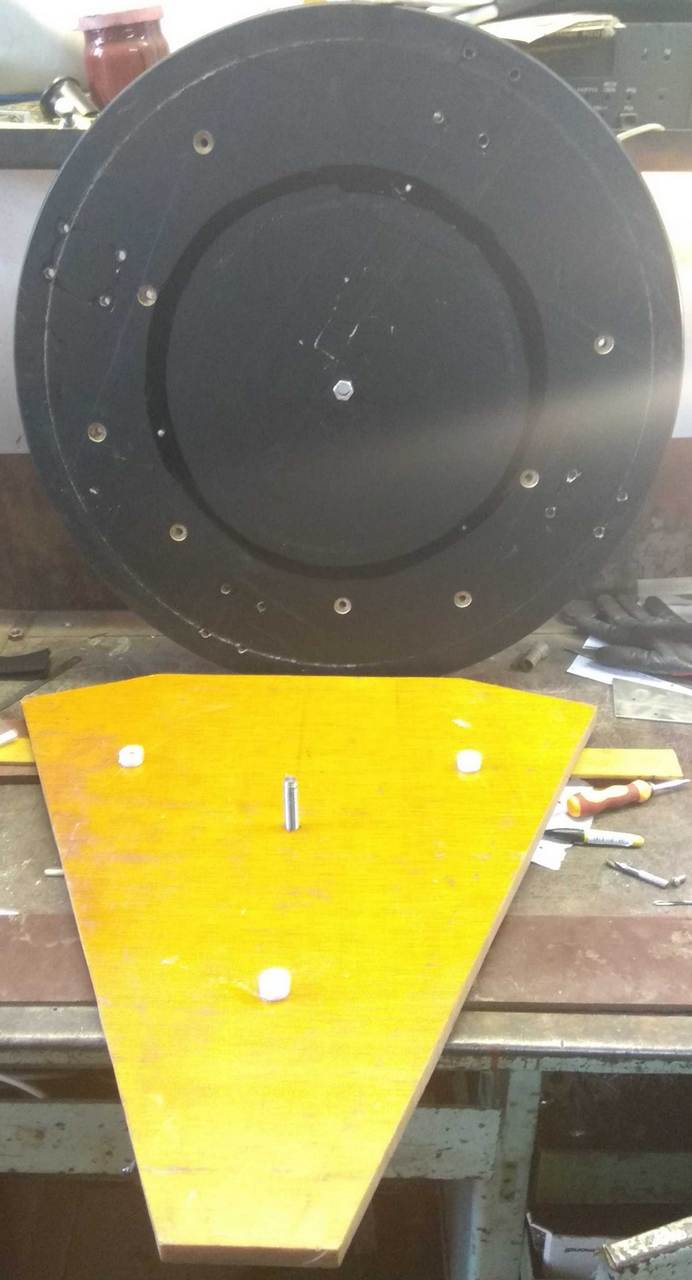 Важливо було розрахувати місце у відповідь на не пошкодженій стороні ламінату «табуретки» Доба, так як безліч отворів і подряпин не дозволяли це робити це «навгад». Випробування під вантажем надихнули – плавність руху
Важливо було розрахувати місце у відповідь на не пошкодженій стороні ламінату «табуретки» Доба, так як безліч отворів і подряпин не дозволяли це робити це «навгад». Випробування під вантажем надихнули – плавність руху від рук виявилася прийнятною. Щоб не псувався ламінат, під час зберігання в місцях раніше встановлених роликів були встановлені «ніжки» у вигляді гуртків з 5мм гуми. На них тепер стоїть тумба під час перерв між спостереженнями. Як осі, на якій тримається азимутальна частина Доба, застосований болт М12. Зверху не туго прикручена гайка із накаткою. Таке кріплення запобігає звалюванню інструменту навіть у позаштатних ситуаціях.
від рук виявилася прийнятною. Щоб не псувався ламінат, під час зберігання в місцях раніше встановлених роликів були встановлені «ніжки» у вигляді гуртків з 5мм гуми. На них тепер стоїть тумба під час перерв між спостереженнями. Як осі, на якій тримається азимутальна частина Доба, застосований болт М12. Зверху не туго прикручена гайка із накаткою. Таке кріплення запобігає звалюванню інструменту навіть у позаштатних ситуаціях.
Зведення у вихідне положення, після завершення автоведення (від нейтрального горизонтально положення, до спрацьовування кінцевого вимикача становить ½ години) здійснюється за допомогою додаткового ролика та важеля.

Випробування під вантажем на плавність ходу

Днище “тумби”. Видно гумові кружки.
Досить трохи підняти і відсунути на захід рухому частину, а потім плавно опустити на провідний ролик.
Позитивні моменти
Платформа вийшла дуже міцною, із запасом по навантаженням.
Немає небезпеки звалювання телескопа, оскільки вона закріплена за допомогою міцного болта.
Витрати матеріали в цілому зовсім невеликі. В основному дорога тільки власна праця
Помилки та недоліки
Лише повністю завершивши процес складання, через час, можна зі сміливістю розуміти як уникати помилок. Наприклад: поперечку основи з труб потрібно було прикріпити на якихось 3-5 мм ближче до південного підшипника. У крайньому положенні він трохи затирає східний сегмент. І хоча при експлуатації це не критично, але в процесі примірки мене це дещо дратувало. Було допущено помилку у висоті розташування кінцевого вимикача – довелося робити ще один отвір. Але головний недолік – сам привід.

Загальний вигляд без труби

Платформа у “розкритому” вигляді
Двигун працює у позамежному режимі – швидкість обертання зменшена в 11 разів проти номінальної. За таких режимів роботи стабільності руху по всій довжині важко очікувати. Виявлено, що платформа поводиться досить стійко на початку роботи на горизонтальному старті, до крайнього східного становища. А от якщо спочатку перевести телескоп з негативним кутом (піднявши західний сегмент), то швидкість потрібно змінити. Поки не знаю з чим це пов’язано, але «лікується» просто: міняю швидкість обертів ШИМ контролера. Можливо й у прослизанні, хоча для більшої зчіпки, провідну вісь і сегмент я змастив рідкою каніфоллю. Саме наведення потрібно робити ніжно, при грубих переміщеннях прослизають сегменти. На наведення це впливає, але змінює рівень горизонту, що у результаті змінює час ведення , зазвичай зменшує.
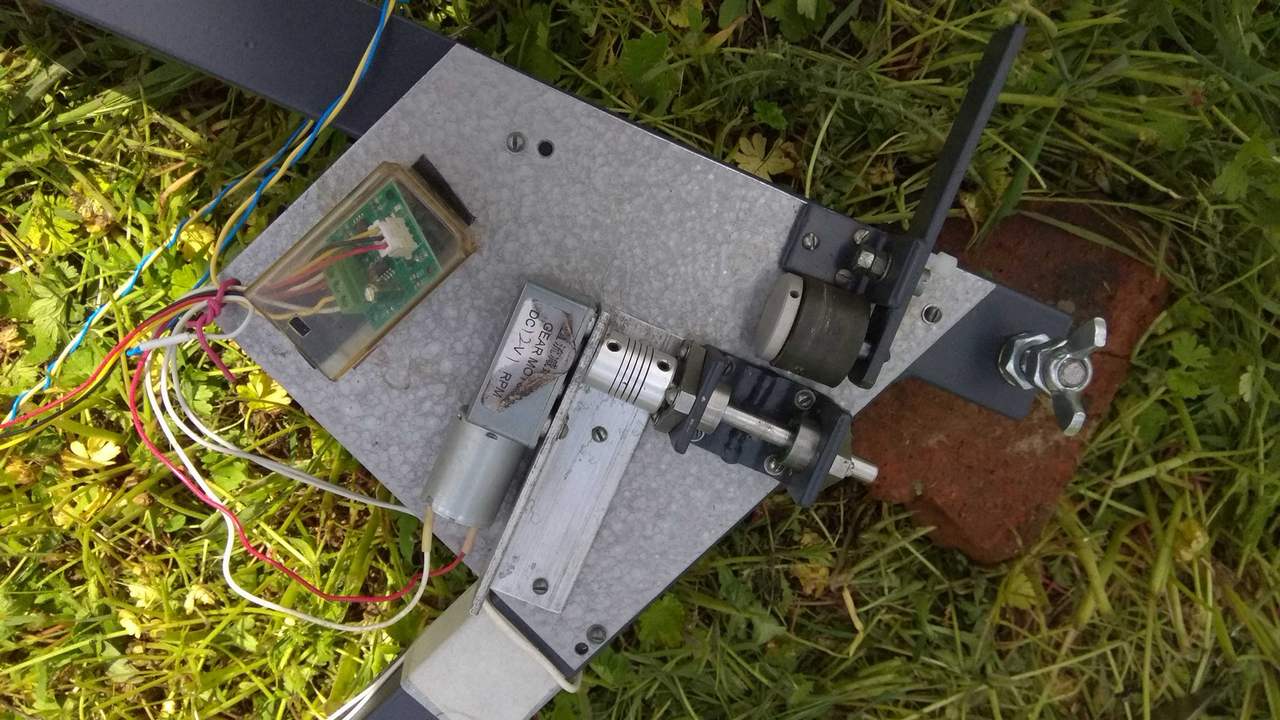
ШИМ контролер, привід та важіль взводу.

Платформа без тумбы