

мікрокоп’ютер Raspberry Pi, з оптичним модулем та забралом від Сонця

гермобокс із встановленою всередині RMS
Нарешті, завершилися випробування з різними режимами налаштувань наших базисних RMS. Вони тривали досить довго, майже 2 місяці, тому що прикладів налаштувань, існуючої конфігурації на чіпі IMX462 та та роздільною здатністю 1920х1080 у світі якщо і є, то одиниці.
RMS (RaspberryPi Meteor Station) – це система спостереження метеорів, заснована на програмному забезпеченні Глобальної метеорної мережі (GMN). Вона працює на мікрокоп’ютері Raspberry Pi (ОС Linux), а як оптичний модуль зазвичай використовує дешеву, але чутливу IP-камеру для виявлення метеорів, для подальшого аналізу їх слідів і завантаження результатів на сервери для детального наукового аналізу.
Історія відеоспостережень метеорів у нашому астроклубі
У 2015р була перша (в принципі успішна) спроба реалізувати базисні відеоспостереження метеорів Маяки-Одеса (див. Результати відеоспостережень метеорів у листопаді 2015р). Базова відстань між станціями близько 35 км. На той момент у розпорядженні були відеокамери VE-6047EF з роздільною здатністю 720×576. Чутливістю хоч і гірше, але все ж таки на рівні відомого Watec 902. Детекція та обробка відео була за допомогою програм UFO, для цього нами в складчину була куплена програма UFOCaptureV2. Хоча був отриманий цікавий матеріал, мені в підсумку не сподобалася якість будованих орбіт, занадто мало зірок для вирівнювання та астрометрії, низька роздільна здатність і відповідно якість усієї картинки та ін.
Наступного року було встановлено ще додаткову камеру в Одесі та оснащена плівковою дифракційною решіткою (500 л/мм) перед об’єктивом. Отримано низку спектрів (див. Спектроскопія метеорів)
Але однаково інтерес через низьку якість і рідкість отримання спектрів швидко згас.
Вибір камер та експерименти
Минув час, в інтернеті з’явилася інформація про використання відносно дешевих IP камер на чіпах IMX291 та IMX327 із системою RMS. Там в основному використовується роздільна здатність 1280х720 через слабкість процесорів на мікрокомп’ютері. Після дослідження в інтернеті інформації про різні способи аматорських спостережень такими камерами та ПК із софтом UFOCaptureHD, нами були закуплені такі IP камери та зроблено перші досліди зі спостережень з використанням UFOCaptureHD (з 30хв режимами та системою автоматичного перезапуску програми протягом ночі) та роздільною здатністю 1920х1080 на звичайних ПК. Було виявлено серйозні недоліки – середня якість та частий пропуск кадрів на метеорних треках через алгоритм стиснення запису самих камер.
Наступним етапом розвитку експериментів були аналогові AHD модулі (дозволяють використовувати якість 1080Р), які через плату відео захоплення і USB3 прямим потоком подавалися на комп’ютер. Вони показали високу ефективність та чутливість майже на рівні людського ока. Основним аргументом переходу на нові камери (крім набагато вищої роздільної здатності), була опублікована інформація фірмою Sony, про те, що матриці минулого покоління, були не здатні реєструвати все світло, з об’єктивами світлосилою вище 1/1,4. Нові об’єктиви для цих камер і модулів, які мають світлосилу 0,9, тепер можуть використовуватися на повну ефективність. Як тільки з’явилися сучасні надчутливі модулі спеціально для raspberry Pi на чіпі IMX 462, було прийняти авантюрне (але як пізніше з’ясувалося вдале) рішення закупити ці модулі і використовувати на повну роздільну здатність з мікрокомп’ютером raspberry Pi4. Довгим та тернистим був шлях адаптації системи софту RMS та налаштування всіх параметрів для спостережень із нашими параметрами. Адже у світі напевно одиниці, а в Україні тільки ми, на даний момент зважилися використати систему RMS з роздільною здатністю 1920х1080. Коли було все готово, у листопаді місяці, ми встановили систему (з направленням на північ) на стінці клубного павільйону на астрономічній станції у с. Маяки. На жаль, О. Ангельский незабаром захворів на ковід, тому основні спостереження та налаштування здійснював лише Олександр Давидов, одночасно спостерігаючи на своїй аналогічній камері, так само встановленої з напрямком на північ, але у себе на балконі в м. Одесі. На початку лютого 2022 року нарешті було встановлено камеру на даху, у напрямок на південь. Розрахунок був таким, щоб здійснювати спостереження південної частини, з подальшою закупівлею компонентів на нову систему для Маяк, ще й для південного напрямку. У результаті могло бути перекриття північної та південної частини небосхилу. Всім цим планам завадила війна із Московією. Всі одеські камери (крім той, що спрямована на південь), щоб уникнути пошкодження від бомбардувань ворога, було демонтовано. У травні місяці одеська камера була увімкнена знову . Після кількох тижнів спостережень, усі були вражені якістю та інформативністю кадрів. Нарешті- 16 червня камеру, було переставлено на північ для базисних спостережень з Маяками. Відстань між базисом залишився колишній (35 км), обидві станції однотипні та оснащені об’єктивами з фокусною відстанню 6мм та світлосилою 1/0,9, які дають поле зору 53х30 градусів. Вибір впав на таке фокусне, з міркування зменшити дисторсію у широко поширених 4 мм (а за фактом 3,6 мм), і досягти максимальної точності при подальшому визначенні орбіт метеорів.
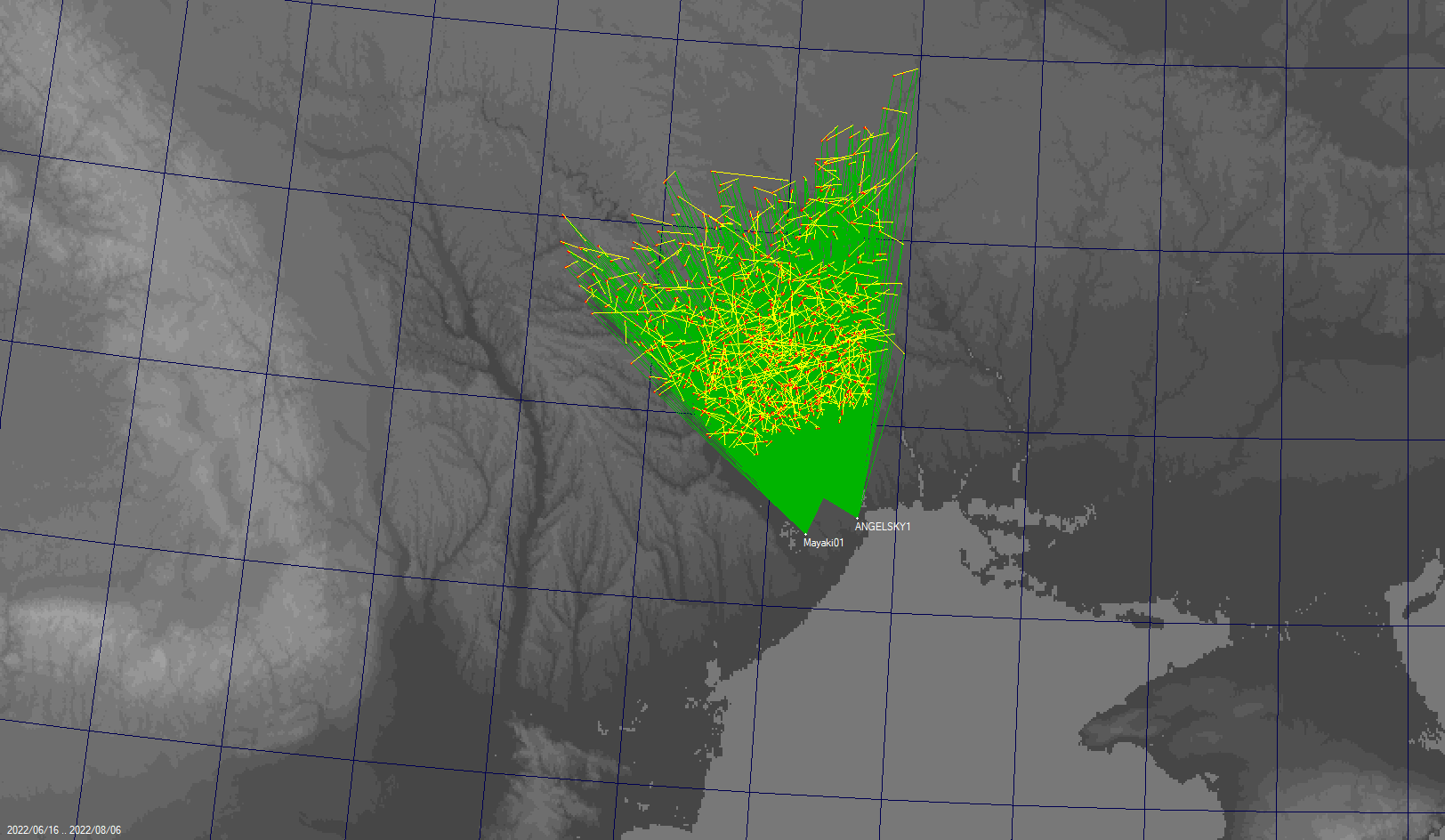
карта поля зору камер із загальними метеорами
Основні переваги системи RMS перед спостереженням систем софту від sonotaco.com:
1) Більш повна автоматизація процесу реєстрації та обробки. Детекція події та обробка даних на кожній камері проводитися автоматично. Таким чином, не потрібно використовувати програми UFOCapture і UFOAnalyzer. Зазвичай вранці, весь матеріал з CSV файлами подій ночі вже готовий. Вручну бажано лише зробити підтвердження самих метеорних подій, а хибні (їх насправді не так й багато) досить просто видалити.
2) Астрометрія проводиться щоразу, для суми з 256 FIT файлів. На відміну від UFOCapture, астрометрія здійснюється незалежно по суті для кожного метеора. Що дозволяє уникнути, хоч і невеликих, але все ж таки реальних рухів напрямків камери за ніч.

приклад дрейфу спрямування камери за ніч
3) Надійність системи. Щоранку, після обробки даних. Комп’ютер після оновлення автоматично перезавантажується, що практично виключає збої. З листопада місяця особливих нарікань зі станції, що у Маяках не виявлено. З досвіду роботи на ПК та старих камер на системі із софту від sonotaco.com, потрібно було неодноразове втручання місцевого персоналу для перезапуску або інших маніпуляцій. Велика подяка за ті події у минулому Ю.Н. Бондаренко!
4) Ергономічність та компактність. Модуль та комп’ютер знаходяться прямо в боксі камери, назовні спускається лише кабель витої пари до адаптера POE.
5) Повторюваність системи. Не важко зробити безліч абсолютно однотипних камер і встановити в будь-яких місцях.
6) Відкритість вихідного коду є можливість перевірки алгоритмів обробки.
Незважаючи на переваги, є й недоліки:
1) штучні FIT файли, що складаються з 256 кадрів, не дозволяють наочно продемонструвати політ метеора у всій красі. Результат реєстрації метеора не є вихідним матеріалом, оригінальні відео не зберігаються.
2) ЧБ зображення, навіть із кольоровими модулями- через недостатню потужність мікрокомп’ютера для обробки інформації.
3) Вкрай недружній інтерфейс ОС Лінукс для користувача. Це мабуть найголовніший недолік системи.
4) Алгоритм детекції недосконалий , хоч і досить рідко, але іноді детекція польоту одного метеора здійснюється двічі, і якщо метеорне подія потрапляє на 2 окремих FIT файлу, він вважається двома різними подіями. Автор системи в курсі та обіцяє згодом виправити. Незважаючи на все це, сучасні камери (наприклад з чіпом IMX 462) реєструють близько десятка метеорів за годину спостережень, що навіть трохи вище , ніж звичайний спорадичний фон при візуальних спостереженнях.
, ніж звичайний спорадичний фон при візуальних спостереженнях.
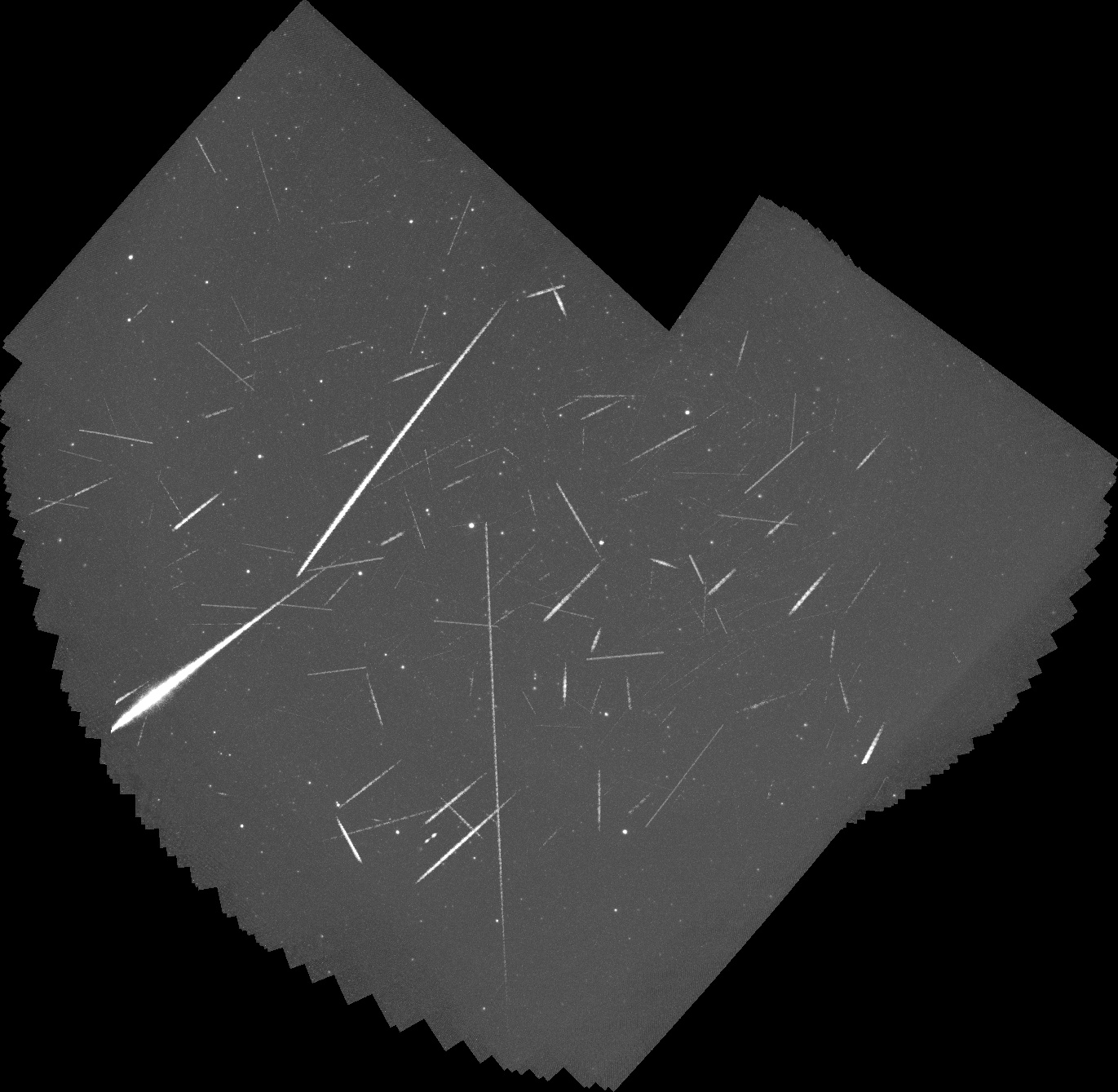
Приклад сумарного складання всіх метеорів за ніч.
Перші результати: навіть у літні місяці, з короткими ночами та при місячному засвітленні неба, виходить багато метеорів. Проникна здатність вражаюча: при достатньому темному заміському небі, впевнено детектуються метеори слабше +3m, аж до +4m! Якіс ть картинці на кадрі приголомшлива, сучасні об’єктиви позбавлені недоліків аберацій. Яскраві метеори тепер не у вигляді “віника”, а цілком естетично виглядають.
ть картинці на кадрі приголомшлива, сучасні об’єктиви позбавлені недоліків аберацій. Яскраві метеори тепер не у вигляді “віника”, а цілком естетично виглядають.

орбіти 54х Південних дельта-Акварід
О. Ангельський, О. Давидов.